物理科学与技术学院彭光含教授/谭惠丽副教授课题组在国际top学术期刊《IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS》发表重要研究成果
来源:物理科学与技术学院 作者: 日期:2024-09-30 点击:1109
我院彭光含教授/谭惠丽副教授课题组在智能网联车控制领域取得了重要研究成果,在智能交通系统领域国际顶级学术期刊《IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS》(影响因子7.9,中科院一区top期刊)发表了题为“Integrating the Safety Control Against Cyber-Attacks on the Global Information in Coupled Map Car-Following Model Under Connected Vehicles Platoon Environment”的研究论文。针对V2X环境下车联网在网络攻击触发时的交通问题,提出安全控制策略应对网络攻击对网联车协同行驶的耦合映射跟驰模型。我校为论文完成第一单位,第一作者和通信作者为彭光含教授,第二作者为我校毕业研究生黎新海同学。2024年该课题组分别在IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS(1篇,中科院1区top), Chaos, Solitons and Fractals(7篇,中科院1区), Physica A, Chinese Physics B, Chinese Journal of Physics, International Journal of Modern Physics C等期刊发表了12篇研究成果,其中中科院一区期刊论文8篇,中科院二区期刊论文1篇,授权发明专利1项。
研究内容:在智能网联环境下,网联自动驾驶汽车(CAVs)通过网络进行V2X通信,共享交通信息,以提高道路的使用效率和安全性。然而,网联环境使CAVs容易受到网络攻击,如黑客攻击、恶意软件等,这些攻击将导致交通信息的误传,致使网联自动驾驶汽车(CAVs)控制决策失误,引发交通事故,甚至导致交通系统的瘫痪,对交通安全和效率构成了严重威胁。针对这种情况,课题组考虑了网络攻击对CAVs交通流的潜在影响,提出了抵御网络攻击的安全控制策略,建立了网络攻击触发下全局信息耦合映射跟驰模型(简称CAGI-CM模型)。通过控制论分析和数值解析方法确定了模型在无拥堵条件下的补偿系数值。通过数值模拟,分析了不同类型的网络攻击和安全控制信号对CAVs队列稳定性和安全性的影响。结果表明:网络攻击破坏CAVs传输的交通信息会导致不同的交通后果,如车辆异常加速、减速,车距拉大、过小,严重时出现碰撞,容易造成交通拥堵和瘫痪。而提出的安全控制信号策略极大地减轻了各种类型网络攻击对CAVs的安全威胁,既可以缓解交通拥堵,又能保证CAVs队列在网络攻击状态下的运行安全与顺畅。下面是部分模拟结果:
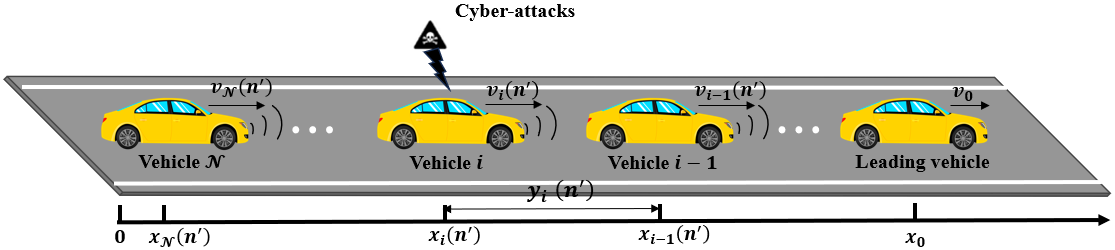
图1 智能网联环境下的CAVs车组示意图
图1为智能网联环境下CAVs车组示意图。图2(a)至(d)展示了在90秒至120秒内,第5辆车的速度信息被网络攻击而篡改为原来的1.5倍时,CAVs队列在轨迹、间隔、速度和加速度上的动态变化。网络攻击发生后,可以明显看到第5辆车及其后方车辆在这些动态变量上均出现了显著波动。尤其是攻击结束后,车队内部形成了较大的间隔。同时,受攻击影响的第5辆车及其随后的车辆的最高速度有显著下降,这不可避免地加剧了交通延误等负面影响。也就是说,网络攻击对CAVs队列的运行造成了严重的不良影响。
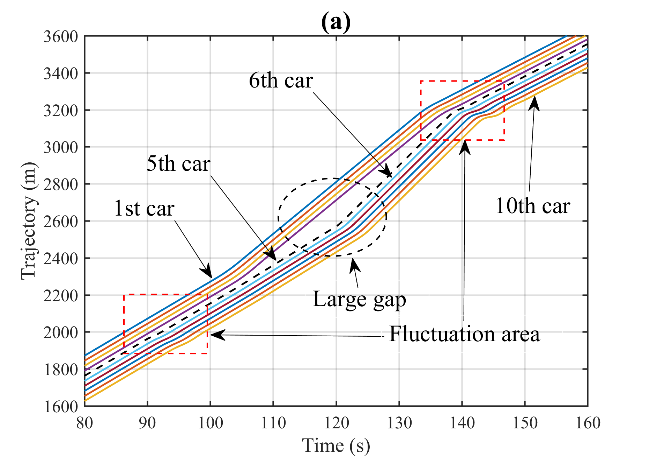
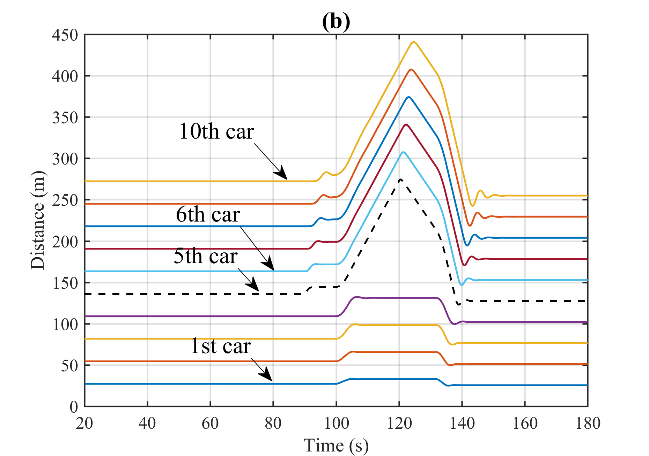
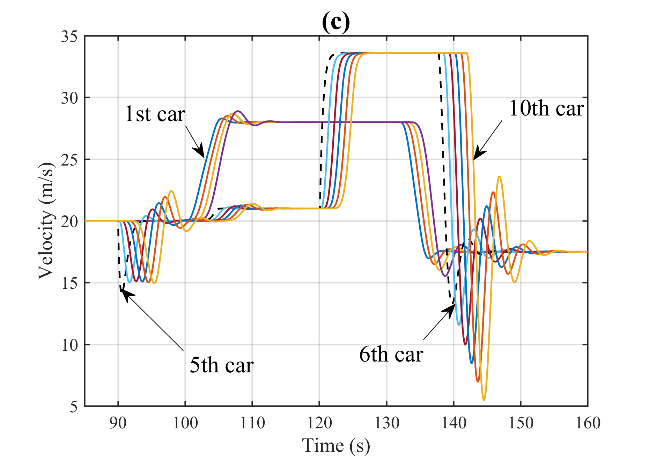

图2 速度篡改变大时网络攻击模拟结果:(a)轨迹;(b)距离;(c)速度;(d)加速度
图3为攻击者在104秒至115秒内不断重放第5辆车的加速度信息时CAVs队列模拟演化结果。在攻击期间(即104-115秒内),第5辆车一直被黑客操纵持续加速到最大的速度,与前车的距离也不断缩小。攻击结束后,遭受攻击的第5辆车试图立即制动以避免与前车碰撞,但不幸的是,第5辆车与第4辆车之间出现了车祸。在这种情况下,整个CAVs队列将出现车辆堆积和堵塞,严重时甚至出现交通瘫痪。
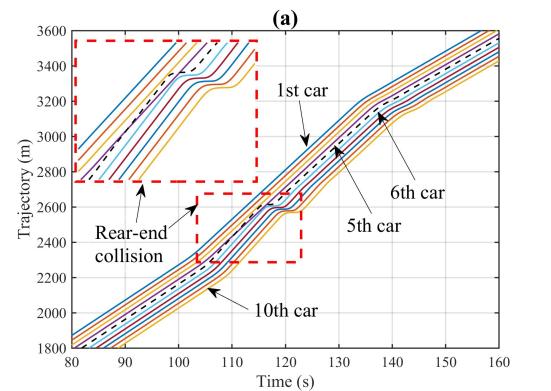
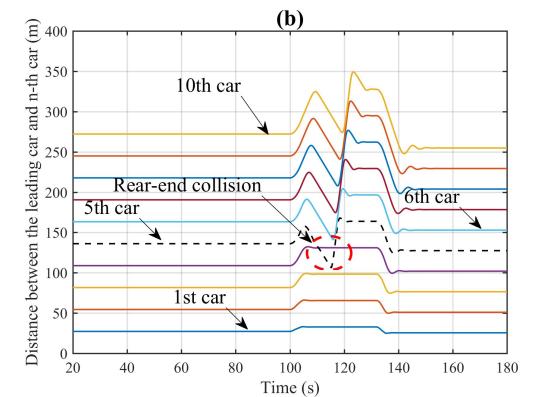

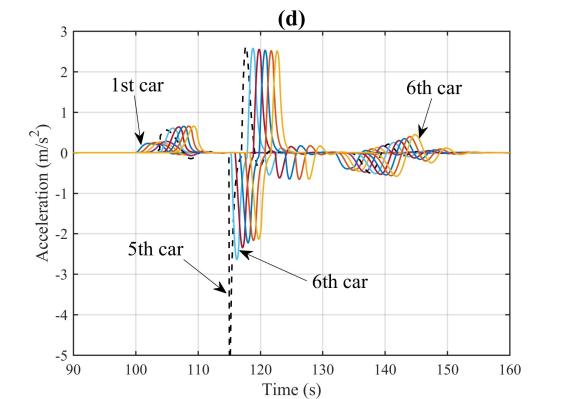
图3 信息重放时网络攻击模拟结果:(a)轨迹;(b)距离;(c)速度;(d)加速度
图4是对应图2进行安全控制后CAVs队列的运行变化。在安全控制信号的调控下,第5辆车与前车之间的间隙不再扩大而是明显缩小,CAVs的整体运行空间变得有序,车与车之间能够以最合适的距离安全行驶。网络攻击的负面效果被安全控制信号抵制,CAVs的速度和加速度可以迅速恢复到稳定状态,从而避免进一步的堵塞。
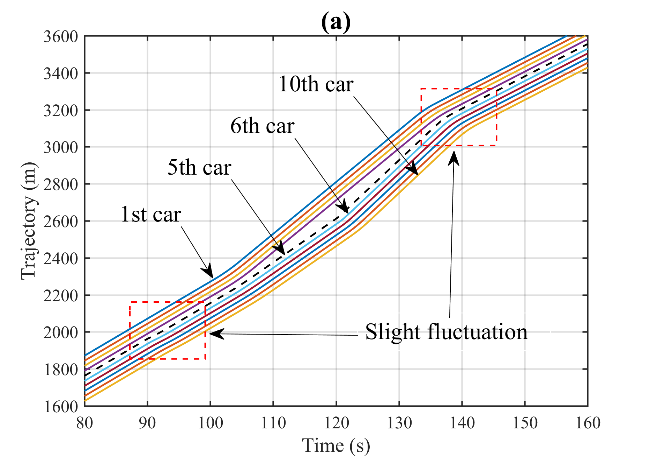
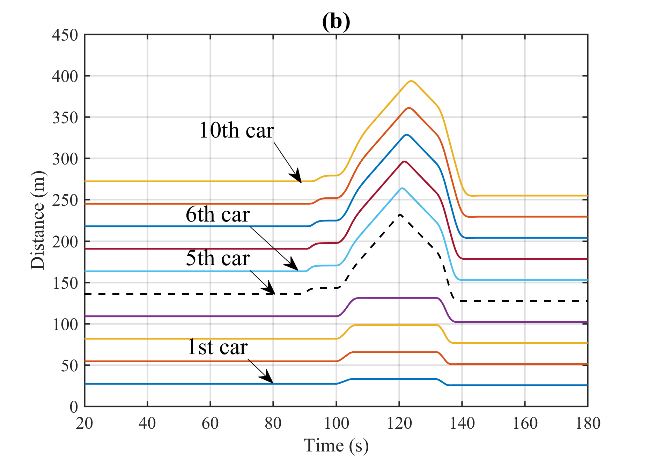
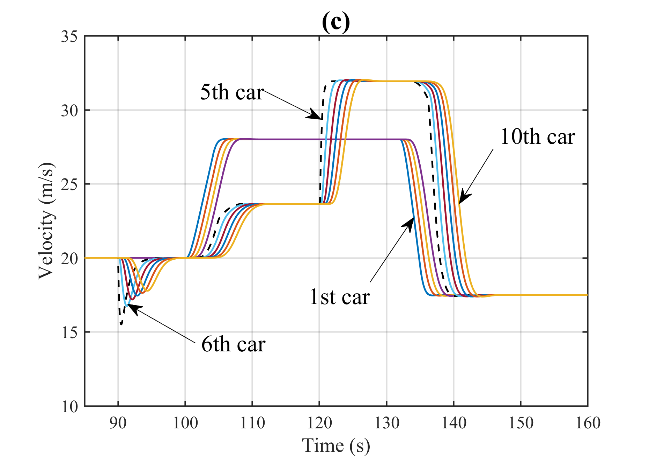
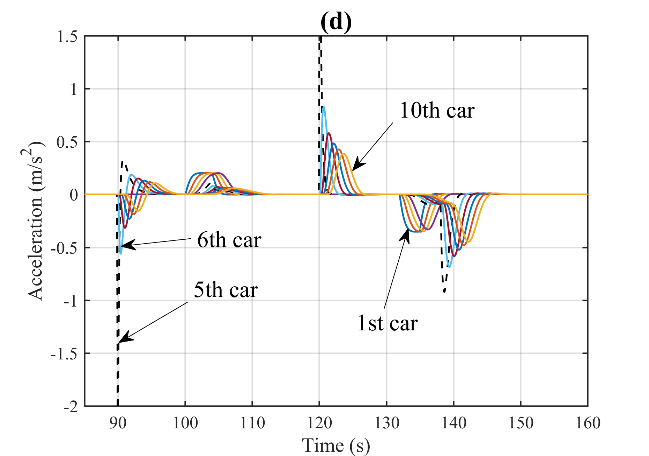
图4 对应图2采取安全控制的模拟结果:(a)轨迹;(b)距离;(c)速度;(d)加速度
图5是对应图3采取安全控制后CAVs队列的控制效果。在激活安全控制信号后,可以观察到CAVs队列的整体交通状况得到明显改善。特别是,受到攻击后不再出现碰撞事故,第5辆车与其前车保持了一定车距,从而确保了行车安全。因此,CAVs队列中的交通瘫痪现象消失,整个车队也能很快的恢复稳定运行。此外,相较于未控制情况,控制之后的车队的车速变化幅度明显降低,使车队保持较好的稳定性,避免了交通堵塞的加剧。

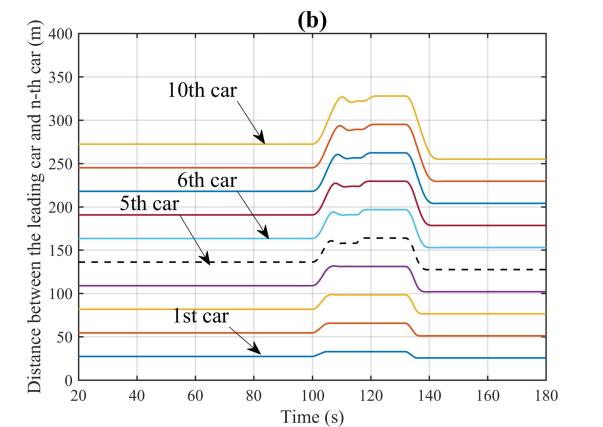
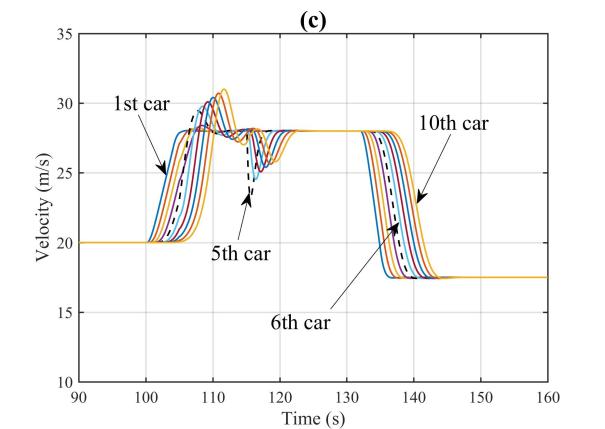
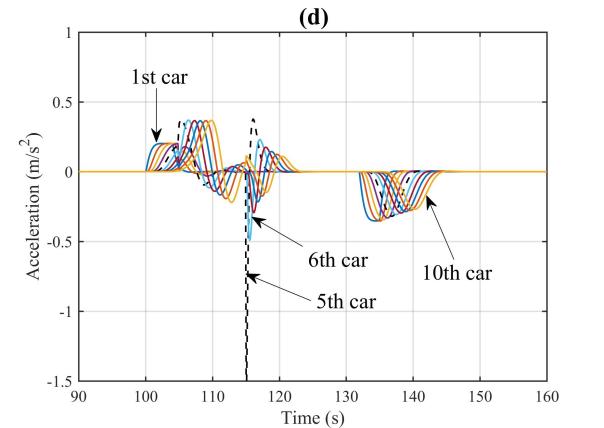
图5对应图3采取安全控制的模拟结果:(a)轨迹;(b)距离;(c)速度;(d)加速度
论文链接:https://doi.org/10.1109/TITS.2024.3391372
 分享
分享
广西师范大学新闻网版权与免责声明:
① 凡本网未注明其他出处的作品,版权均属于广西师范大学新闻中心,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:广西师范大学新闻网”。 违反上述声明者,本网将追究其相关责任。
② 凡本网注明其他来源的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网对其负责。
③ 有关作品内容、版权和其它问题请与本网联系。
※ 联系方式:广西师范大学新闻中心 Email:xinwen@gxnu.edu.cn
友情链接
联系方式

官方微博

官方微信

师大校报

独秀之声
 点赞
点赞 评论
评论




 点击排行
点击排行 推荐阅读
推荐阅读
